
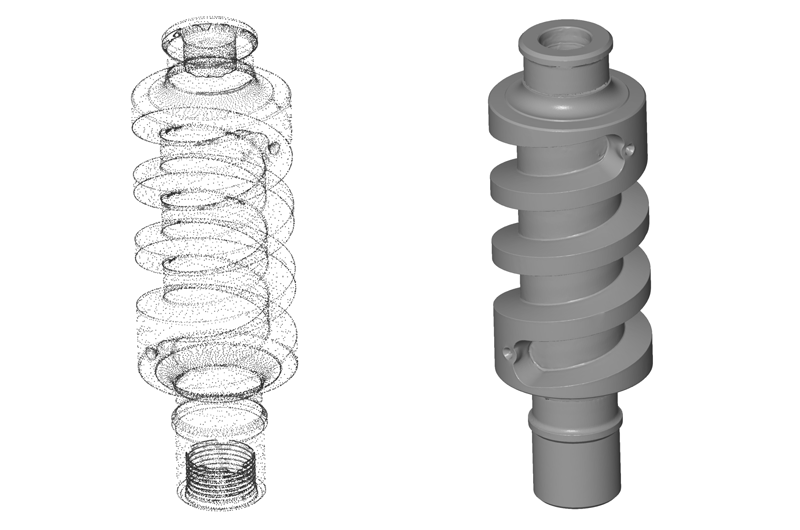
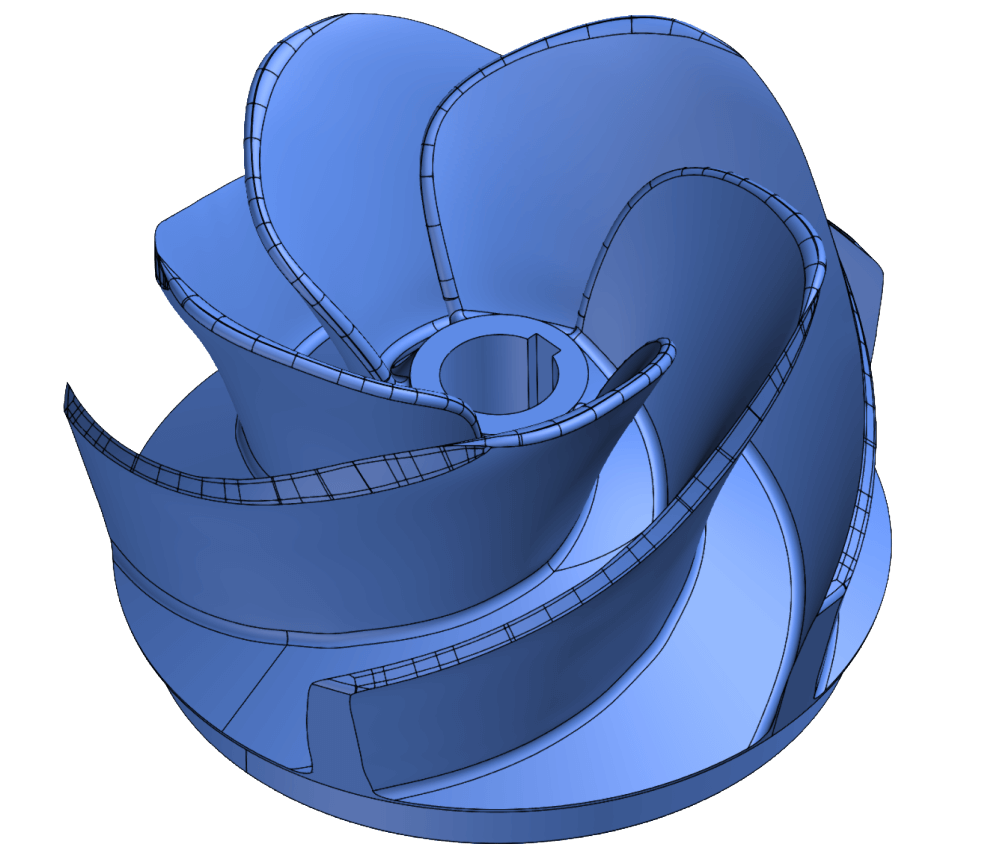
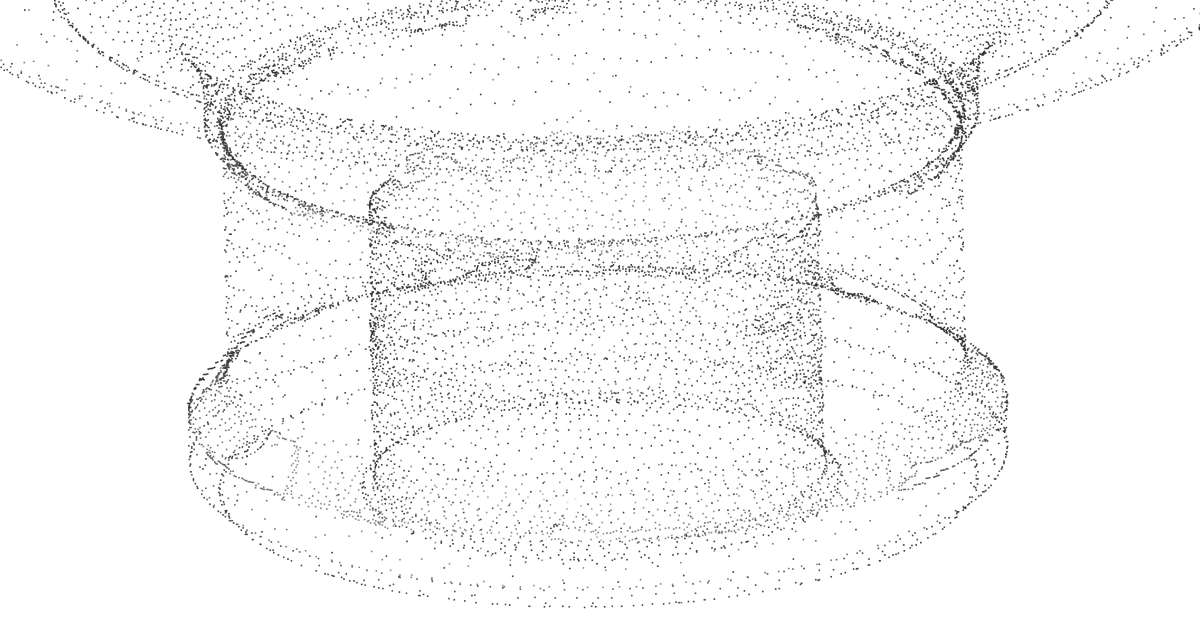
Was ist eine Punktwolke?
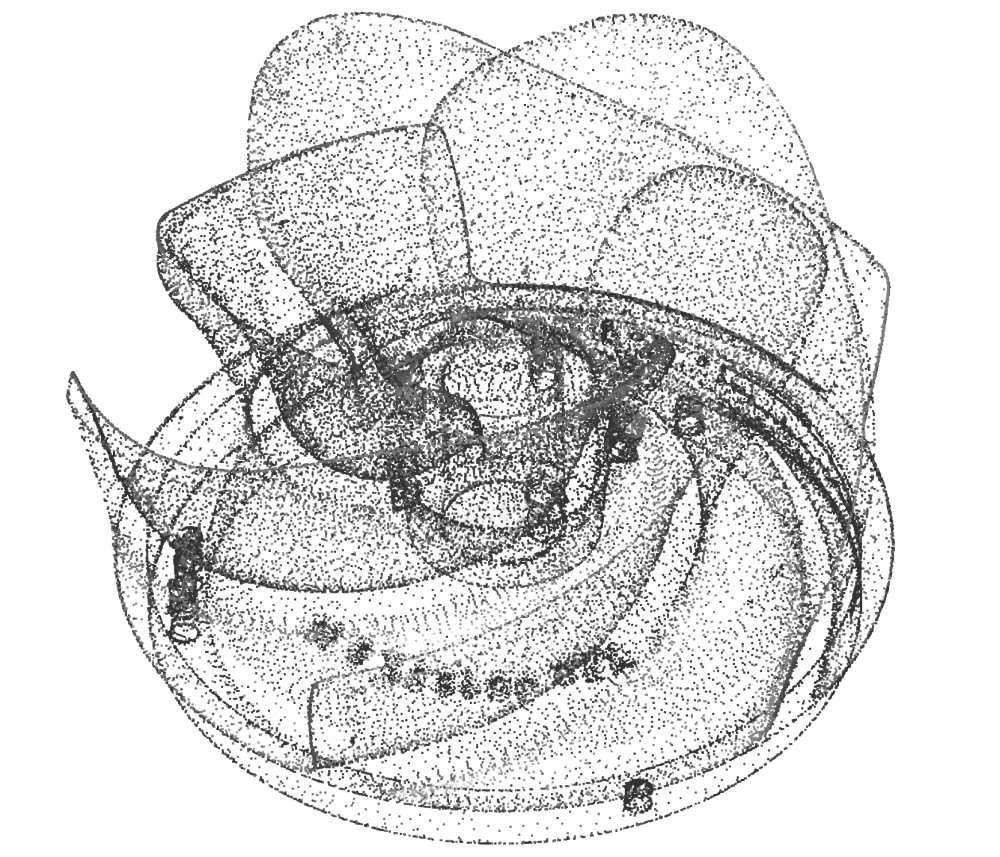
Eine Punktwolke ist eine Sammlung von Datenpunkten in einem Vektorraum. Jeder dieser Punkte enthält seine eigenen X, Y und Z-Koordinaten sowie weitere Informationen wie Farbwerte und Messgenauigkeiten. Sie repräsentieren die äußeren Oberflächen von Objekten oder Landschaften.
Punktwolken sind in verschiedenen Bereichen wie Automobilindustrie, Engineering und Bauwesen weitverbreitet. Sie bieten hoch detaillierte Darstellungen von physischen Umgebungen und werden oft zur Erstellung digitaler 3D-Modelle und für 3D-Vermessungen verwendet.
Wie wird eine Punktwolke erstellt?
Für das Erstellen von Punktwolken kommen je nach Anwendungsgebiet unterschiedliche Technologien zum Einsatz. Die Auswahl richtet sich dabei hauptsächlich nachdem, welche Genauigkeit und welches Messvolumen erforderlich sind.
Grundsätzlich kann zwischen drei Technologien unterschieden werden:
Terrestrische Laserscanner
Beim terrestrischen Scanning ist der Scanner meistens auf einem Stativ montiert und rotiert 360 Grad um die eigene Achse. Dadurch wird die Umgebung durch Millionen von Datenpunkten erfasst und ein hoch detailliertes Abbild erzeugt.
Um alle erforderlichen Bereiche zu scannen, muss der Scanner an mehreren Standpunkten positioniert und der Scanprozess mehrfach wiederholt werden. Diese Art von Laserscannern kommen meistens in der Architektur und im Bauwesen zum Einsatz, da sie die Erfassung großer Bereiche in sehr kurzer Zeit möglich machen. Ein Nachteil ist jedoch die geringere Genauigkeit im Vergleich zu anderen Scantechnologien.

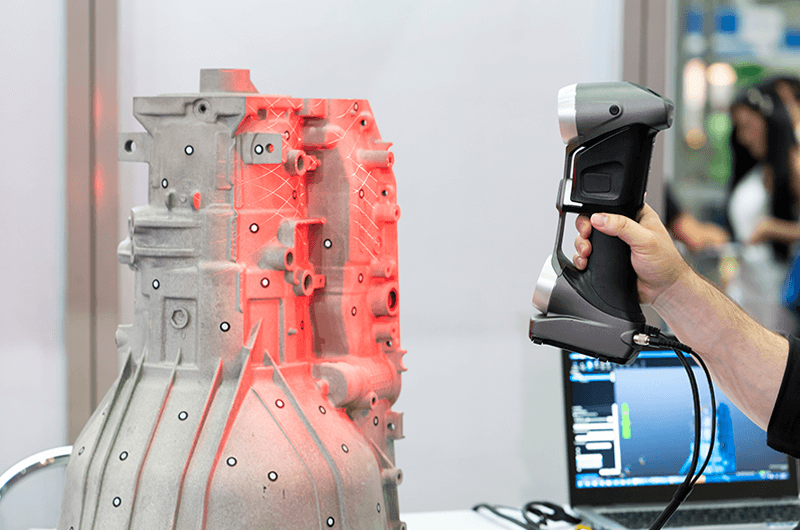
Mobile 3D-Scanner
Unter den mobilen 3D-Scannern stellen handgeführte 3D-Scanner den geringsten Hardwareaufwand dar. Durch die sehr kompakte Bauweise lassen sie sich in 1 bis 2 Koffern leicht transportieren und sind vor Ort schnell einsatzbereit. Die Punktewolken werden hier durch Laserstrahlen oder Photogrammetrie erzeugt.
Für größere Einsatzbereiche, bei denen z.B. komplette Anlagen digitalisiert werden müssen, kommen 3D-Scanner mit konfigurierbaren Messvolumen zum Einsatz. Diese funktionieren nach dem Prinzip der Streifenprojektion oder auch Streifenlichtscanning genannt. Dieses Verfahren erzeugt die höchste Punktdichte und bündelt somit die meisten Informationen. Jedoch entstehen dadurch große Datenmengen, die je nach Umfang des Projekts schwieriger zu verarbeiten sind.
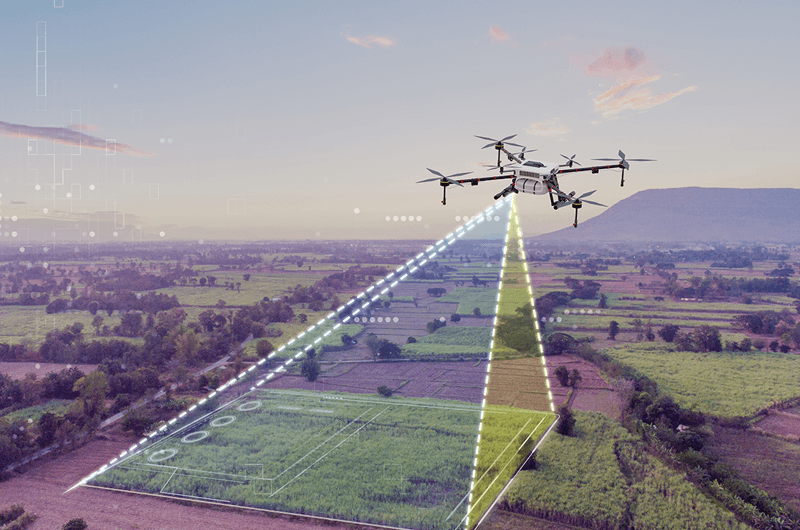
Photogrammetrie
Bei dem photogrammetrischen Verfahren werden vom Objekt mehrere sich überlappende Bilder aus unterschiedlichen Positionen und Winkeln erstellt, bis das Objekt vollständig erfasst ist und daraus ein dreidimensionales Abbild erstellt werden kann. Mit diesem Verfahren lassen sich sowohl kleine als auch sehr große Objekte erfassen. Dabei bestimmen einige Faktoren wie die genutzte Hardware und die Verarbeitung in der Software die erzielbare Qualität der Punktwolke. Für das Vermessen sehr großer Objekte oder ganzer Landschaften werden Drohnen mit entsprechender Technik ausgestattet. So werden in einer Kombination aus Luftbild-Photogrammetrie und 3D-Laserscanning 3D-Daten gesammelt und daraus Punktwolken erstellt.
Verwendung von Punktwolken in der Praxis
Punktwolken finden überall Verwendung, wo ein digitales Abbild von einem Objekt oder einer Umgebung benötigt werden. Zu den häufigsten Einsatzgebieten gehören Automotive, Reverse Engineering, Architektur und Bauwesen.
Punktwolken für die Qualitätssicherung im Automotive
Im Automobilbau werden besonders hochauflösende 3D-Scanner verwendet, mit denen sehr dichte Punktwolken erzeugt werden. Dabei entstehen pro Scan 8 bis 12 Millionen Koordinatenpunkte, auf deren Grundlage eine vollflächige geometrische Vermessung möglich ist. Die hoch detaillierten 3D-Scans werden auch für andere Qualitätsprüfungen wie Falschfarbenvergleiche und Oberflächendefektanalysen eingesetzt.

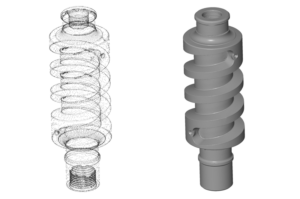
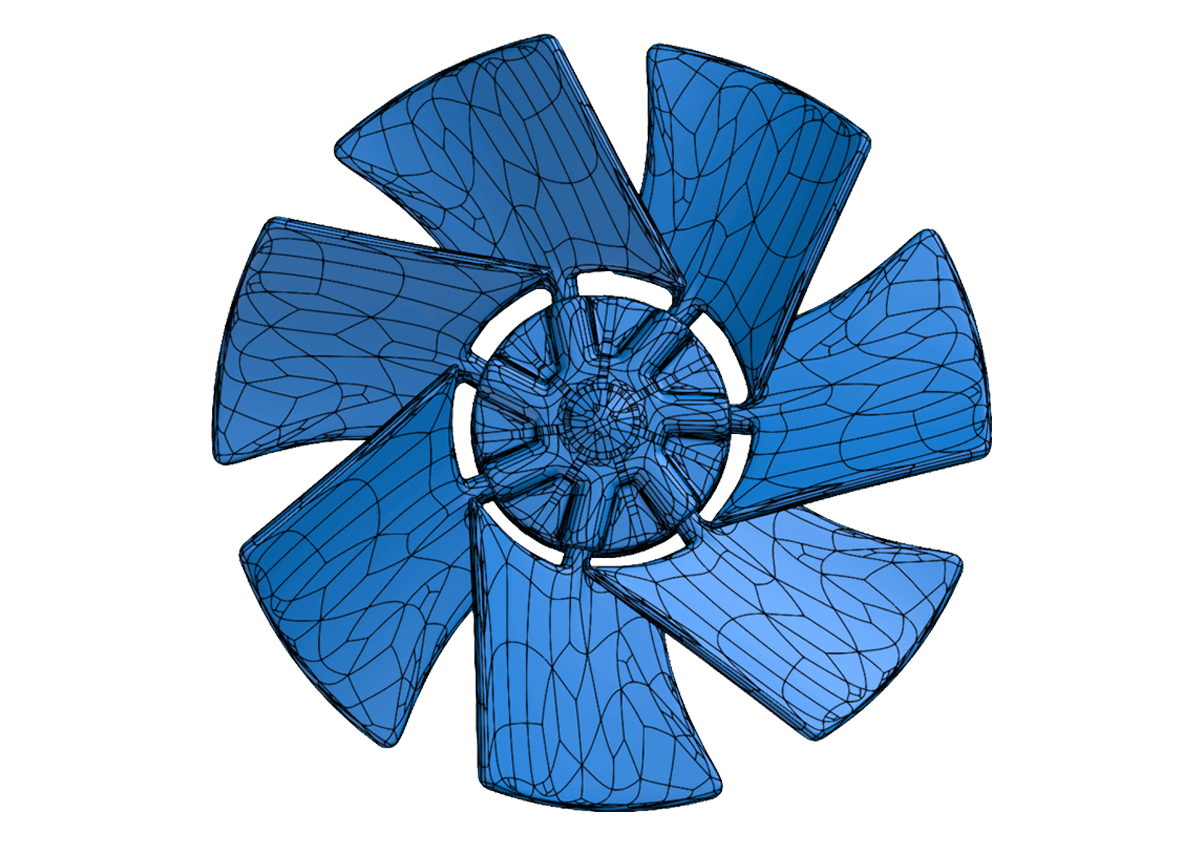
Punktwolken für Reverse Engineering
Bei dem sogenannten Reverse Engineering oder der Flächenrückführung geht es um die Rekonstruktion von 3D-Daten. Dabei werden aus den Punktewolken im Triangulationsverfahren Polygonnetze im STL-Format erzeugt. Auf Grundlage von hochaufgelösten STL-Daten lassen sich gleichwertige Konstruktionsdaten rekonstruieren. Mit diesem Prozess lassen sich etwa einzelne Prototypen, Baugruppen oder ganze Produktionshallen rekonstruieren.
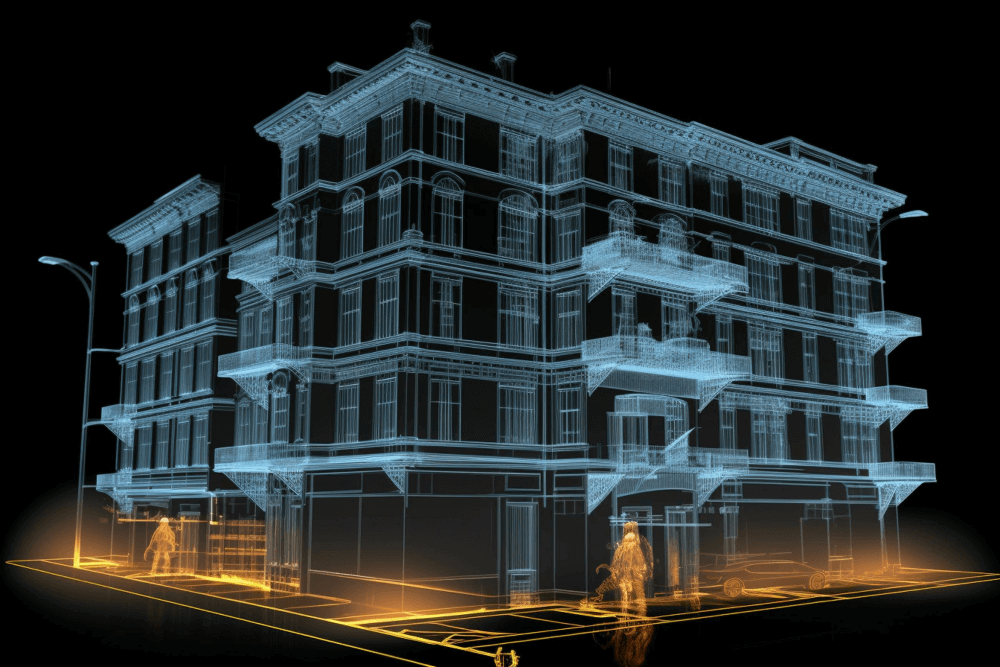
Punktwolken für Architektur und Bauwesen
Im Bauwesen ist es oft erforderlich, nachträglich ein BIM-Modell erstellen zu lassen. BIM steht für „Build Information Modeling“ und beschreibt einen digitalen Prozess zur Optimierung der gesamten Projektphase, der vom Entwurf über den Bau bis zur Wartung reicht. Dadurch, dass ein BIM-Modell alle planungsrelevanten Informationen enthält, kann der Bau effizienter und günstiger realisiert werden.
Ein vollständiger 3D-Scan mit einer ausreichend dichten Punktewolke ist somit eine perfekte Grundlage für die Planung von Bauprojekten, Renovierungen und Modernisierungen.
Arbeiten mit Punktwolken
Punktwolken können aufgrund ihrer Größe und Komplexität schwer zu handhaben sein. Die Verarbeitung erfordert spezielle Software und ausreichend hohe Kapazitäten in der Hardware.
Um eine möglichst genaue und hohe Datenqualität zu erreichen, sollte zudem Vorwissen im Umgang mit der Software vorhanden sein. Stolpersteine, die zu fehlerhaften Punktwolken führen, sind beispielsweise durchscheinende, spiegelnde oder raue Oberflächen und Umgebungslicht. Durch die entsprechende Expertise können Messexperten fehlerhafte Punktwolken bereinigen und weiter optimieren.
Datengröße reduzieren und Oberflächen optimieren
Punktwolken können sehr groß sein, was zu Speicher- und Verarbeitungsproblemen führen kann. Gängige CAD-Software ist für die Verarbeitung von Punktwolken kaum bis gar nicht geeignet. Daher werden Punktwolken zunächst mit spezieller Software wie Zeiss Inspect oder mit BIM Programmen wie Autodesk Revit bearbeitet.
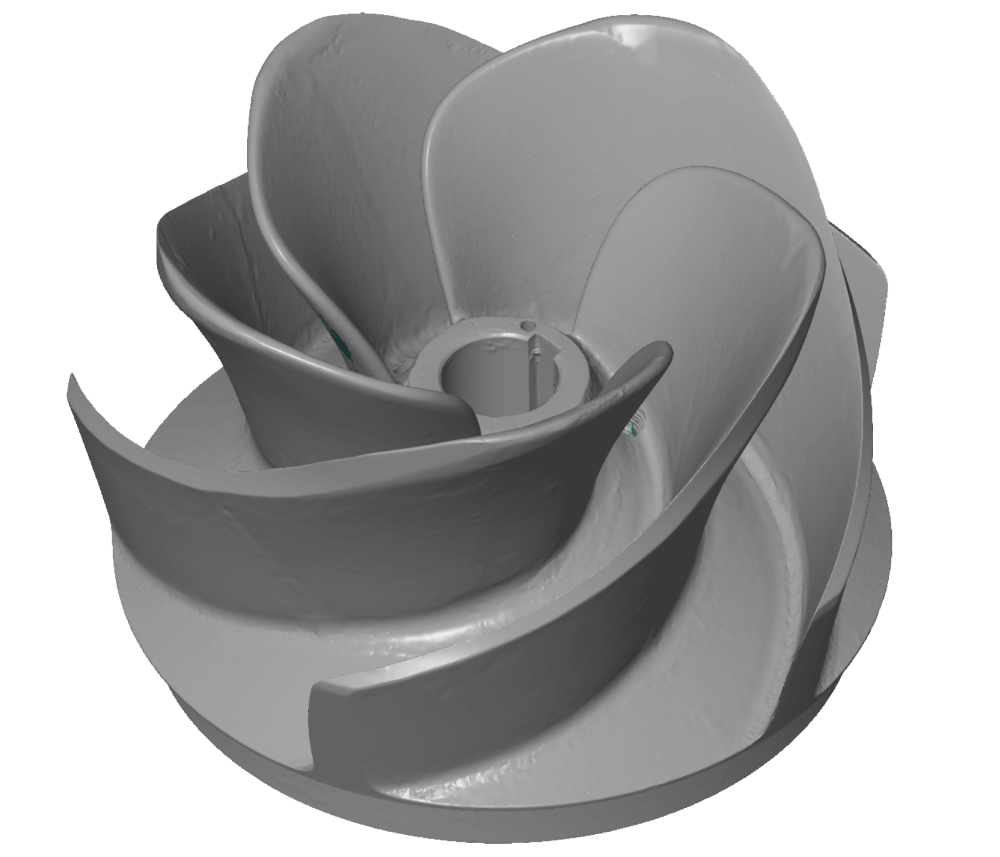
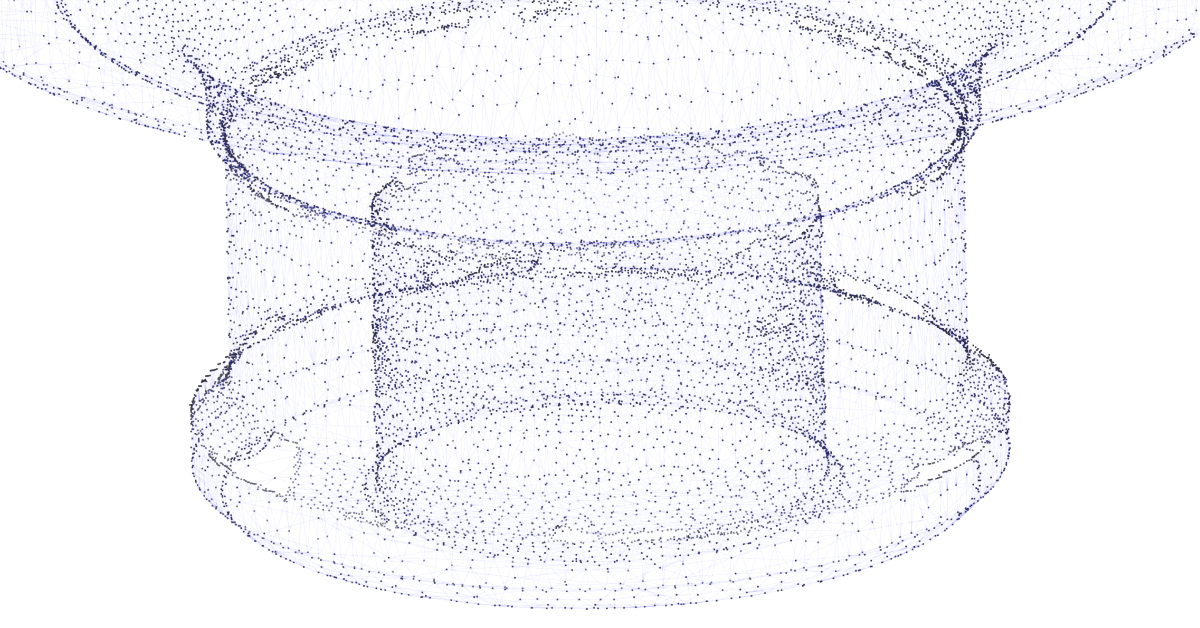
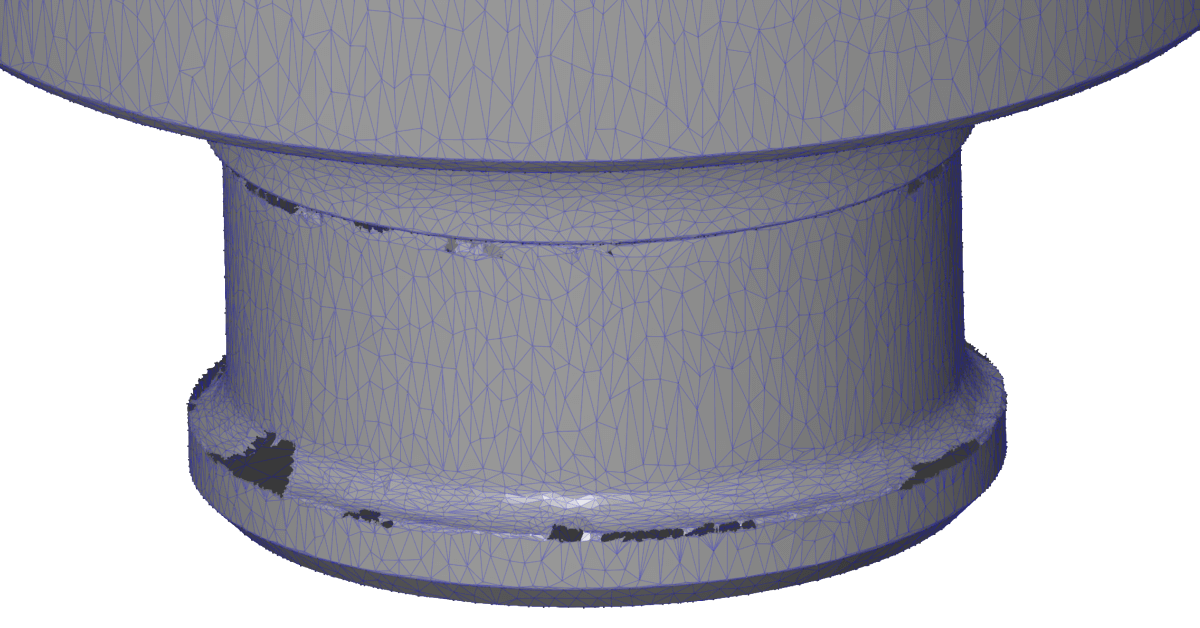
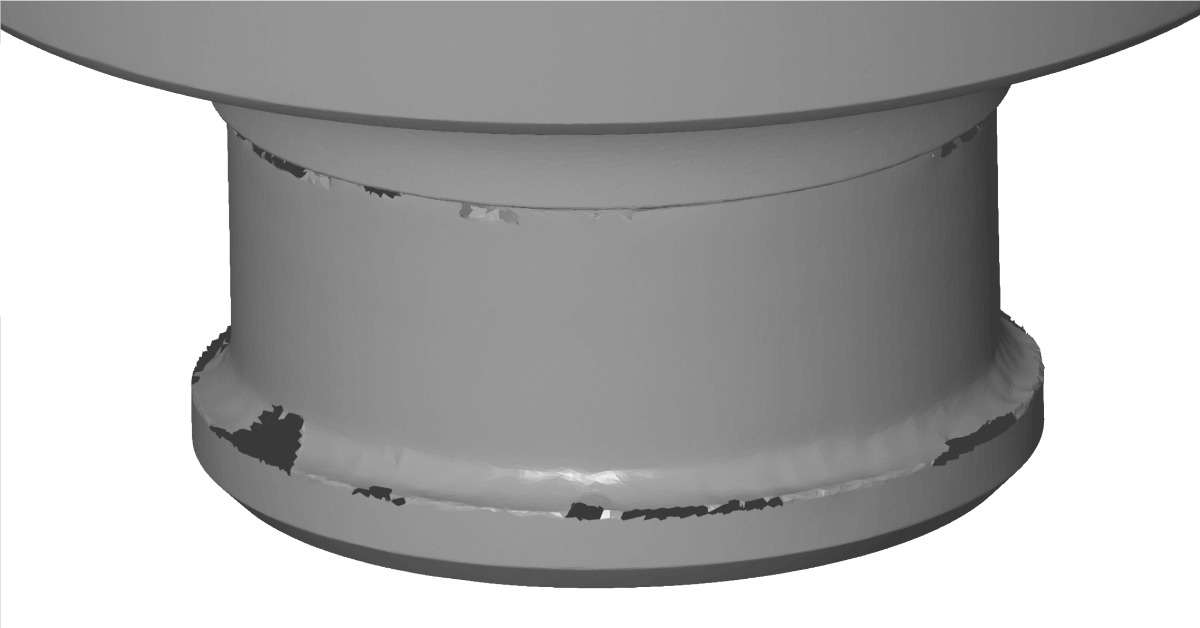
Nach dem Bereinigen von fehlerhaften Datenpunkten erfolgt die Triangulation. Dabei wird aus Millionen von einzelnen Punkten ein Polygonnetz im STL-Format erstellt.
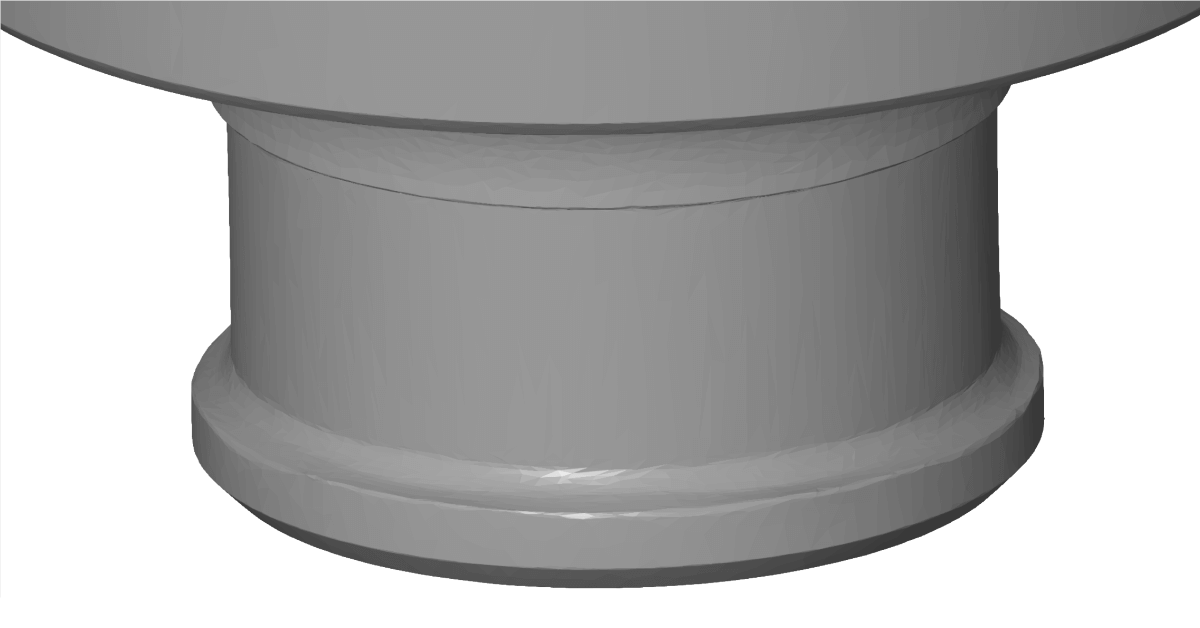
Das Polygonnetz kann weiterhin bearbeitet und idealisiert werden, indem Defekte wie Löcher und Dellen neutralisiert werden. Artefakte und verzehrte Oberflächen, die durch Spieglungen oder Umgebungslicht entstehen, werden durch Glättung der Polygonnetze ebenfalls weitestgehend neutralisiert.
Je nach Auflösung des verwendeten Scanners können die erzeugten STL-Daten extrem detailliert sein und entsprechend große Datenmengen erzeugen. Um die Weiterverarbeitung in CAD-Software zu vereinfachen, werden die STL-Daten ausgedünnt, also die Anzahl der Polygone reduziert.
Das Resultat der Nachbearbeitung sind optimierte 3D-Daten für eine reibungslose Verwendung in CAD-, BIM- und Simulationssoftware.
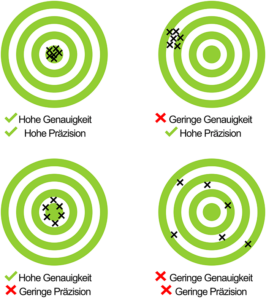
Genauigkeit der Daten
Die Genauigkeit der Punktwolke hängt von dem 3D-Scanner, der Verarbeitungssoftware, dem Messobjekt, von äußeren Einflüssen sowie der Expertise des Messtechnikers ab.
Moderne terrestrische Laserscanner bieten eine Auflösung von 165 Megapixel und eine Positionsgenauigkeit von 2 mm auf 10 m Messabstand. Erhöht sich der Messabstand auf 25 m, wird eine Genauigkeit von 3,5 mm erreicht. Solche Angaben werden von Herstellern auf Datenblättern angegeben, sollten jedoch nicht als garantierte Werte gesehen werden. In der Praxis kommen meistens andere Störwerte wie Distanzrauschen, Reflexionen oder Distanzfehler hinzu.
Mobile 3D-Scanner, die Punktewolken mit dem Verfahren der Streifenprojektion erzeugen, erreichen eine höhere Genauigkeit als terrestrische oder handgeführte Laserscanner. Je nach verwendetem Messvolumen und Auflösung entstehen Messgenauigkeiten von bis zu 0,005 mm.
Allgemein gilt es für das jeweilige Projekt, einen 3D-Scanner auszuwählen, der eine ausreichende Präzision und Datenqualität bei einem verhältnismäßigen Arbeitsaufwand erzeugt.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}